June 6/2018: Underactuated Finger
Mehrdad R. Kermani and I published the details of the Underactuated Finger design in IEEE/ASME Transactions on Mechatronics, “Grasp and Stress Analysis of an Underactuated Finger for Proprioceptive Tactile Sensing,” (Access).
February 28/2018: ROS package for the finger is released on GitHub!
You can now have access to the ROS package for the Sensorized Underactuated Finger (SUF) here:
https://github.com/mahyaret/SUF-ROS
February 24/2018: CAD model is released on GitHub!
You can now have access to the design CAD files here:
https://github.com/mahyaret/SUF
December 14/2017: Sensorized Underactuated Finger at IROS 2017 Vancouver Canada
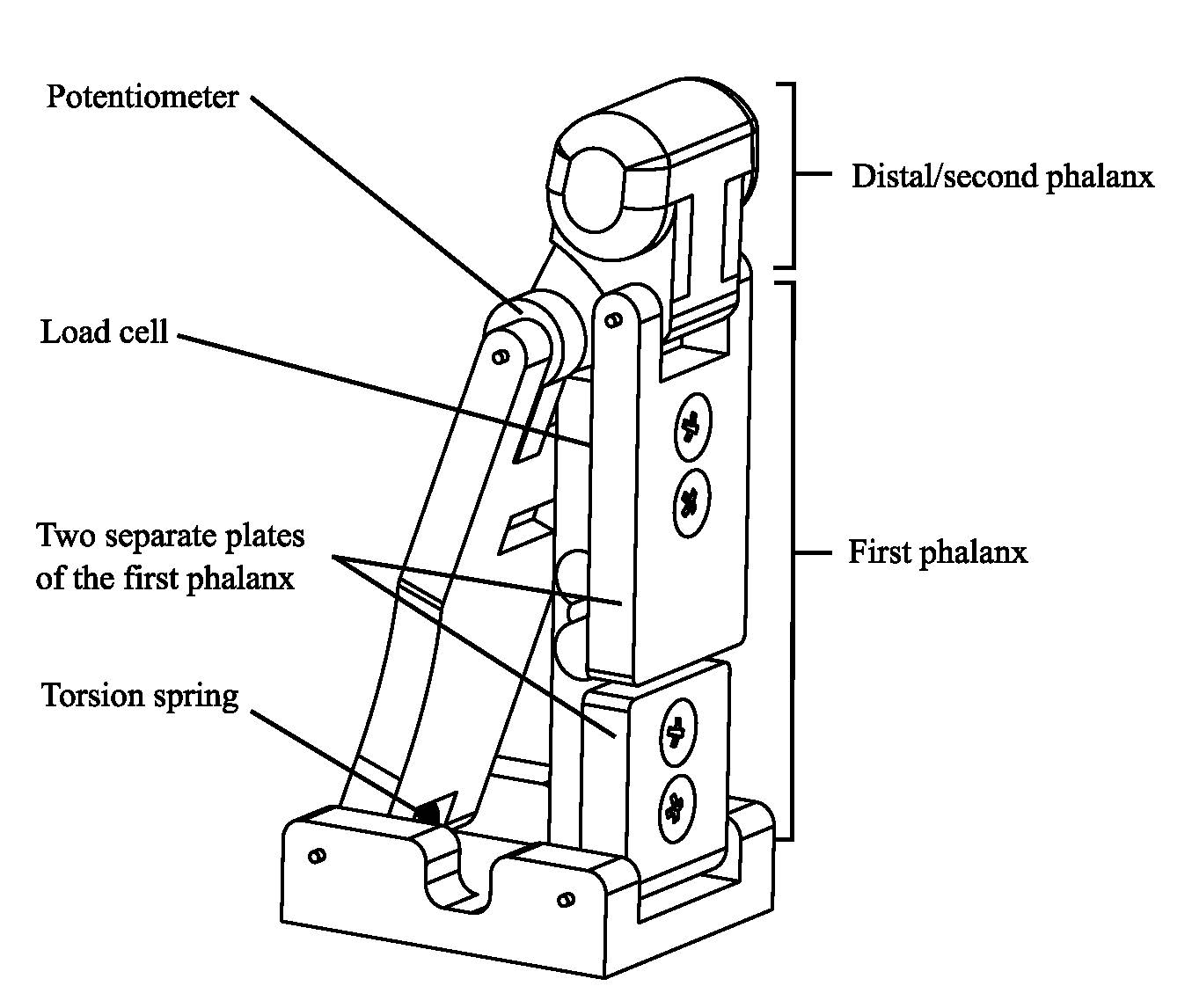
This page presents latest NEWS about the design and evaluation of our new sensorized underactuated self-adaptive finger. Our design incorporates a two degrees-of-freedom (DOF) parallel based underactuated mechanism with an embedded load cell for contact force measurement and a trimmer potentiometer to acquire the joint variables. Integration of the sensors leads to tactile feedback fidelity without compromising the finger size and complexity which results in efficient and robust functionality. The particular rounded shape of the distal phalanx and high equilibrium position enable the finger to deliver both precision and power grasps.
The design is initially introduced here:
Mahyar Abdeetedal, Mehrdad R. Kermani, “Development and Grasp Analysis of a Sensorized Underactuated Finger,” The 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017, Vancouver, Canada. http://ieeexplore.ieee.org/document/8206538/
The full details of the design and grasp analysis are studied here:
Mahyar Abdeetedal, Mehrdad R. Kermani, “Grasp and Stress Analysis of an Underactuated Finger for Proprioceptive Tactile Sensing,” IEEE/ASME Transactions on Mechatronics. https://ieeexplore.ieee.org/abstract/document/8373740/